改进的步进电机系统可以提供比标准变速电机更高的精度,且没有伺服电机的高成本和高复杂性。
”
新的步进电机技术的正在被更多应用场景采用,并且成本比其它方案更低。 几乎每个工业机械应用都涉及创建和控制某种类型的运动。当设计人员考虑价格和性能要求时,气动系统可能是一个很好的低成本选择,而液压系统则可以提供更大的推力。不过,最常见的动力仍是某种形式的电动机。无刷电机驱动器
对于工业应用来讲,运动控制不仅仅是指通过旋转电机来产生的运动,通常还涉及到使用某种形式的驱动来精确控制设备元件的位置、速度和加速度。
标准的交流感应电机和直流电机,最适合以定速或可变速度控制简单的开 / 关和连续运行,但它们并不适合定位和精细控制。伺服控制器、驱动器和电机为所有类型的运动控制提供了非常高的性能,但其复杂性使工程和采购成本上升。
在成本方面,步进电机的成本比伺服解决方案更低,但控制精度却比标准交流感应或直流电机更高。虽然步进电机系统有一些限制,但新的高压母线版本克服了其中一些问题,使该技术成为更多应用的可行选择。
5 种电机技术和常见用途
选择任何电机系统都需要了解负载以及负载如何在力、速度和精度的条件下进行运动。以下是一些工业应用中最常见的电机类型 :
1
交流感应电机
提供多种外形尺寸和额定马力,适用于一般应用场合,使用简单的接触器定速运行,或使用变频器以可调速度运行。
2
直流电机
在低速时能够提供良好的扭矩,需要配套的直流驱动器,通常可以提供合理的速度控制。
3
直流步进电机
由于使用快速脉冲指令使电机以小步数快速移动的方式移动,速度控制比交流或直流电机更好,但这些电机运行时的速度较低,输出力矩较小。
4
高母线电压步进电机
本质上与直流步进电机相同,但驱动器可以接受交流电源并产生更高的直流母线电压,因此具有更高的速度和扭矩能力。
5
伺服电机
在整个速度范围内以全扭矩提供高速移动,对位置和速度可进行超精确控制。
为了使电机可以变速运行,所列出的每种电机类型都需要一个适当的驱动器。高级控制指令,尤其是协调运动, 需要一个单独的控制器,它可以是专用的运动控制器,也可以是更高端的可编程逻辑控制器 (PLC) 或 PC。 在某些情况下,控制器和驱动器功能可以组合在同一个设备中。
在通常情况下,如果额定值匹配,可以集成来自不同供应商的电机、驱动器和控制器,但对于更复杂的系统(特别是伺服和步进电机),许多用户发现从单一产品组合中选择产品以获得最佳兼容性更为有效。同时, 从一个供应商而不是几个供应商那里获得支持也更容易。
反馈和运动控制
用于运动控制的电机,通常连接到带有齿轮箱、齿形皮带、齿条和小齿轮和类似装置的机械设备,因此无论最终输出是旋转还是线性,它们都可以与被驱动设备保持直接的无滑移运动传输关系。
通常认为, 交流感应和直流电机是两种最容易安装和维护的电机。 部分原因是它们通常以开环方式运行,尽管设备上可能有一些传感器来提供指示。例如,一台简单的起重机可能会使用可逆电机来提升或降低负载,所依靠的仅仅是行程末端的限位开关。
相对而言,伺服电机需要更多的设计和安装工作。它包含精确的电机传感器,可以随时更新电机(以及驱动设备)的位置、速度和加速度,使其成为操作机器人手臂关节或 X-Y-Z 笛卡尔定位器的理想选择。
大多数步进电机处于中间位置,因为它们的指令精度很高,尽管一般没有持续的闭环反馈。然而,将步进电机作为闭环操作是可能的,而且变得越来越普遍。另外,带有集成驱动装置的更先进的步进电机也开始出现, 并提供了一种内置闭环控制的形式。相较于伺服电机,作为一种成本更低的运动控制替代方案,要决定何时采用步进电机是正确的设计选择,需要了解更多细节。
何时使用步进电机与伺服电机
对于运动控制应用,每个行程路径称为轴,可以是旋转的或线性的。有时像机器人、定位设备和印刷机这样复杂的设备会有很多轴,彼此之间必须紧密配合。在这些情况下,由带有内置路径规划器的专用运动控制器操作的伺服系统通常是最佳选择。
对于许多单轴应用,步进电机具有更好的性价比。 步进电机还有其它独特的功能,这些功能对某些应用很有帮助,例如 :
• 零速度下无抖动 ;
• 具有降低空载电流的选项,可在驱动器处于静止状态且不受重力或其它力的情况下节省能源并减少发热。
步进电机由驱动器产生的脉冲串驱动。通常情况下,电机旋转 360 度,对应 200 步, 因此每个完整步代表 1.8 度旋转。大多数用户选择更精细的步进模式(称为微步进),例如半步、四分之一步等(图 2)。
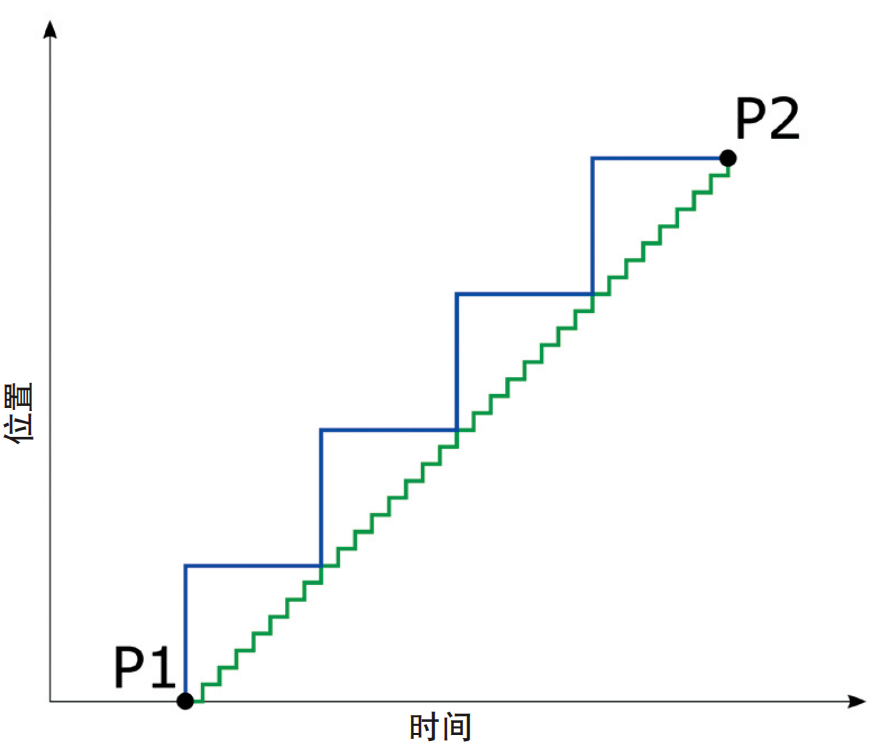

▎图 2 :微步(绿色)与完整步(蓝色)实现的最终位置相同,但 微步需要更高频的指令来平滑运动操作。
微步进可以提供更平滑的操作, 但由于微步进模式更精细,因此控制器所需的最大脉冲频率也更高 ,从而需要一些权衡。步进扭矩会随着电机速度的增加而下降,因此可用速度必须与机械运动传输要求匹配。
标准步进系统没有内置正闭环反馈,因此有必要在设计中规定归位和位置验证 ,以确定步进电机是否已停转或失去同步。这需要一些编程工作、设计考虑,并且有可能花费操作时间。正如在读取负载之前必须将称重秤归零一样,步进系统必须经过归位程序才能为未来的移动建立位置基线。归位必须在调试或上电期间执行,并且可以在运行期间定期重复执行。
位置验证类似于归位,但更多的是在运行期间进行快速检查,以确认位置是否符合预期。它可以周期性地执行,但在最严格的应用中可能每个周期都需要验证一次或多次。
将设备驱动到由位置开关监控的已知位置,可以实现归位和位置验证。也可以在步进电机或驱动设备上安装增量或绝对编码器来监控运动 ,这是用于位置验证的伪闭环方法。
无论是采用伺服系统还是步进系统,通常都使用控制器来命令电机旋转。以下是一些典型的运动控制类型,按复杂性递增的顺序排列 :
1. 匀速旋转 ;
2. 旋转一定度数后停止 ;
3. 从一个速度加速到另一个速度(线性或 S 曲线);
4. 从停止位置加速到一定速度,转动一定度数后减速至零速度(梯形运动);
5. 匹配外部编码器(齿轮)的速度 ;
6. 遵循凸轮曲线(遵循基于外部编码器输入的复杂运动曲线)。
基础的步进驱动器并不是智能的,因为它们只能接收控制器的脉冲序列指令,然后将其放大以提供电机所需的脉冲电压。一些步进 驱动器确实包含控制器,但通常使用外部控制器,如具有高速数字输出的 PLC 或 PC。由于很多自动化机器已经使用 PLC, 因此与高速离散输出卡和步进驱动器一起使用的 PLC, 对单轴控制更有吸引力 。
功率更大的步进电机系统
传统的步进电机驱动器必须由低电平直流电压(12V、24V 等)供电,但较新的设计可以由 120/230V 交流供电,因此具有更高的母线电压(图 3)。 这使兼容电机能够在比标准步进电机更高的速度下实现更高的扭矩 。
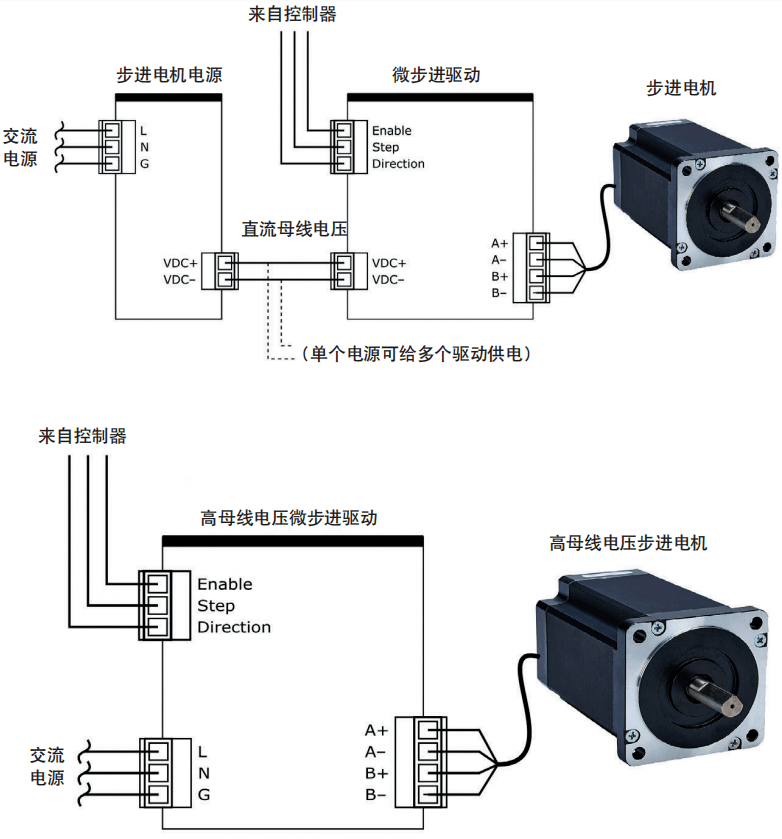
▎图 3 :传统的直流 步进系统需要单独 的电源 ;高总线电 压的步进系统,使 兼容的步进电机能 够实现更高的扭矩 和速度,因此它们 可以在更多的应用 中工作。
市场上已经有满足 NEMA 标准规格的多种步进电机可供选择,并且结构紧凑,便于机器设计。由于步进电机没有其它电机那样的过载能力,因此在根据经验确定步进电机和驱动器的规格时,应使预期负载仅占可用扭矩的 50% 左右,以避免潜在的停转情况。设计人 员还必须考虑步进器的速度限制。查看步进电机的速度 – 扭矩曲线,以确定电机是否能够在应用所需的速度下提供足够的扭矩。
大多数设计人员都熟悉使用交流感应和直流电机进行基本的设备运动控制,并且知道伺服电机是机器人等要求苛刻的运动控制应用的高性能解决方案。 对于需要精确单轴或简单多轴运动的应用,步进电机系统可以提供可靠的运动控制,且成本仅为伺服系统的 25%。 最新的高母线电压步进器硬件具有更好的扭矩特性,从而使步进器可以适合更多应用场景。设计人员应与步进电机供应商合作,以评估更适合的选项。
原创文章,作者:老铁外链, 老铁,如若转载,请注明出处:http://boke.6ke.com.cn/?p=49324
