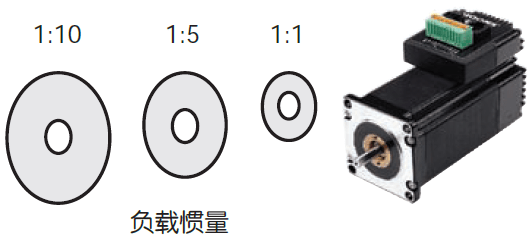
每种型号 伺服电机驱动器步进电机的规格里均有最大静止转矩及电机惯量等参数,各项参数与负载转矩及负载惯量间必定有相关联系存在,选用步进电机时应考虑负载机构的运动条件要求,如加速度的快慢、机构的重量、机构的运动方式(水平,垂直,旋转)等。惯量越大时,需要越大的加速及减速转矩,加速及减速时间越短时,也需要越大的电机输出转矩。传统的开环步进电机无法提供更大的转矩满足一些复杂的应用,这时候往往需要选用步进伺服电机。
Q:但是选用 步进伺服电机替换步进电机时,有什么优势?
A:步进伺服电机通过内置高分辨率编码器,实现位置闭环控制。强易用性,无需参数整定,静止无抖振,防堵转。闭环步进模式适用于一些对于抖动要求高的特殊应用。
B:步进伺服电机可以短期超载150%工作,可以适应高加减速的应用场合。
C:步进伺服电机控制器支持多种控制模式,通过SCL指令,Modbus,CANopen,eSCL 指令,EtherNet/IP 或EtherCAT 协议,实现多轴网络通讯。
提问
什么是步进伺服电机?
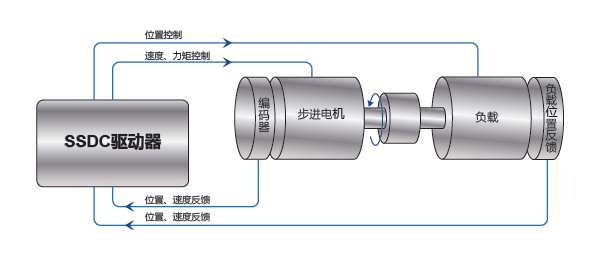
步进伺服电机是步进电机领域的一项创新革命,本体是步进电机,增加位置反馈器件(光电编码器或磁编码器),运用类似伺服电机的控制方法形成的闭环控制系统。它通过伺服技术提高步进电机的性能,创造出具有优异特性和广泛功能的产品,是紧凑电机+驱动+编码器+控制器全合一解决方案。
步进伺服电机的特点
01
全闭环

● 精确的位置及速度控制以满足苛刻的应用要求;
● 高鲁棒性的伺服控制可适应宽范围的惯性负载和摩擦负载变化;
● 内置高分辨率编码器,提供了精确的位置精度,最小定位误差仅为±1脉冲(0.018°)。
02
简单参数整定
● 使用预定义的整定参数即可获得良好的性能表现及系统稳定性;
● 根据不同等级的控制要求,提供多种整定参数选择;
● 对于绝大多数应用场合,默认参数即可满足使用,无需手工整定。
03
高速响应
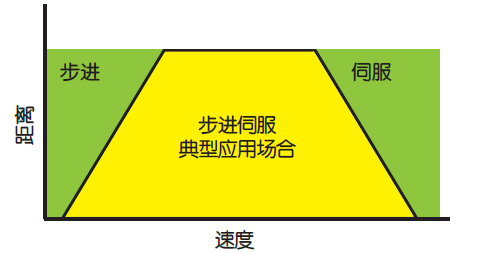
● 在点对点快速定位的运动场合,先进的伺服控制技术提供了大力矩输出,使得系统具有极高动态响应,大大超越了传统步进系统极限。
04
大力矩
● 在全伺服模式下运行,电机的力矩可以被100%充分利用,系统设计时无需考虑力矩沉余;
● 在大多数应用场合,电机可以输出150%的额定力矩,大力矩输出在某些情况下可以简化减速机构的复杂度。50%过载能力在短距离,高加减速的应用场合将系统优化得更加高效。
05
运动监测
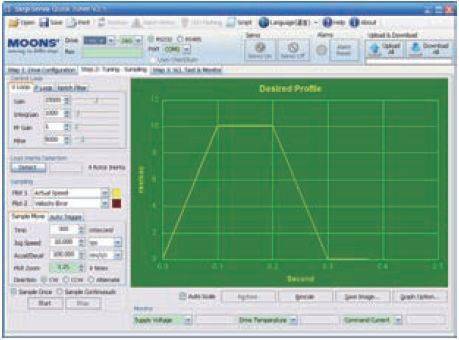
● 对某些实时性运动有苛刻精确性要求的应用场合,Step-Servo Quick Tuner提供了一个简单实用的工具用来监测实际运动轨迹;
● 可用来监测诸如实际速度和位置误差等常用指标,以此评估系统当前实际性能表现;
● 交互式监控与整定结合的界面可以快速地获得良好的性能输出。
原创文章,作者:老铁外链, 老铁,如若转载,请注明出处:http://boke.6ke.com.cn/?p=49356
